IK Path Planning
IK Solver
用于将关键点数据转化为关节动作(各关节旋转角度)
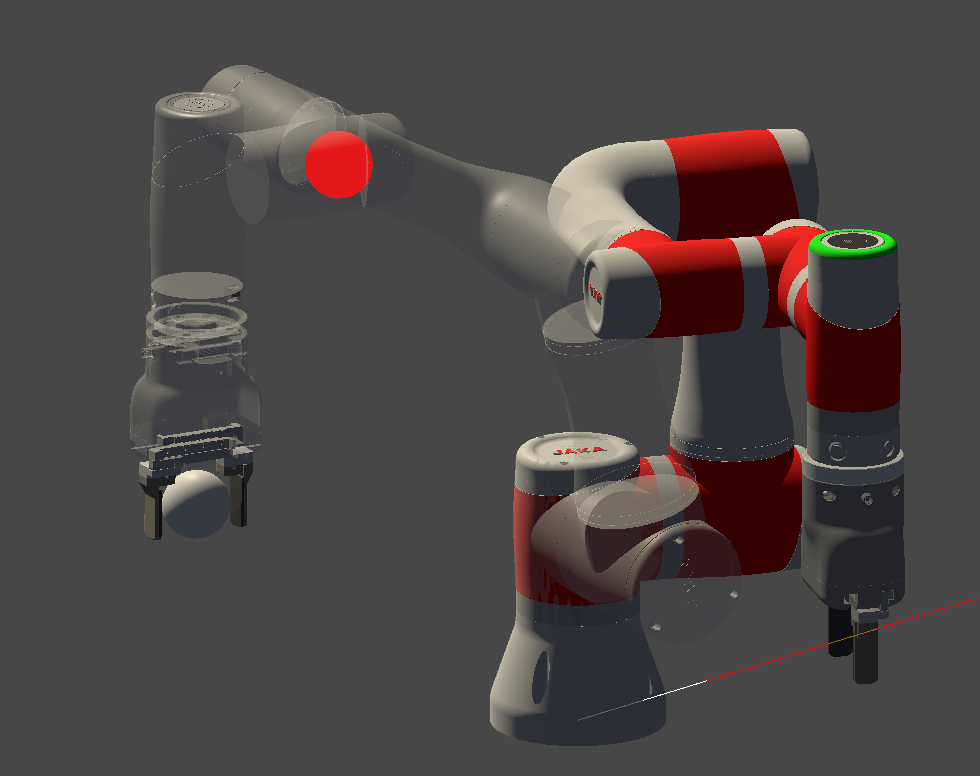
希望机械臂的末端始终竖直。方便夹取。
Unity IK: https://github.com/2000222/Robotic-Arm-IK-in-Unity
自定义自由度,非常好用,基于关节梯度迭代的方法
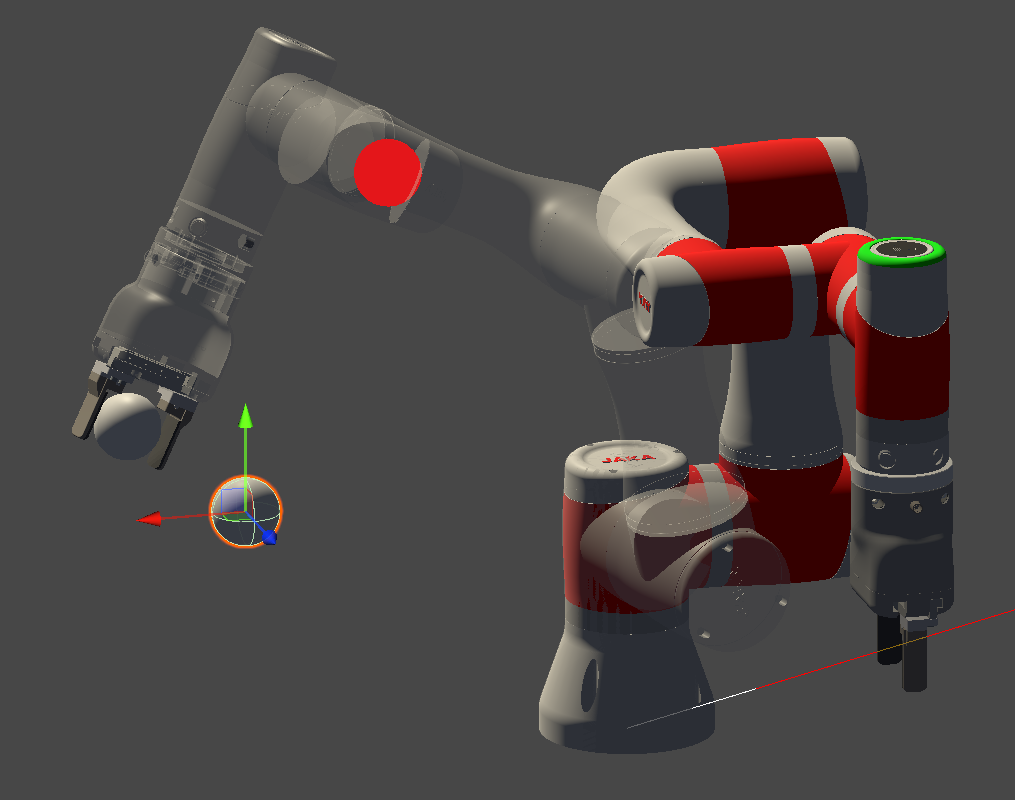
由这个 IK 算法负责机械臂前三个 joint 的旋转,确保 j4 的 anchor(红点)处于物体后上方的特定位置。
j4 位置的计算方法:
1
2
3
4
5
6
7
8
9
10
11
| public Vector3 GetPositionForJ4(Vector3 pos)
{
Vector3 forward = pos - Joints[0].transform.position;
forward.y = 0;
float angle = Mathf.Acos(0.1148f / forward.magnitude);
Vector3 left = Quaternion.AngleAxis(-angle * 180f/Mathf.PI, Vector3.up) * forward;
left = left.normalized * 0.1148f;
Vector3 offset = forward - left;
offset = offset.normalized * 0.1175f;
return pos + Vector3.up * 0.2446f - offset;
}
|
之后由向量计算得出 j4 应该旋转的角度,以确保末端竖直。
j5 不旋转,j6 的旋转角度由物体朝向决定。
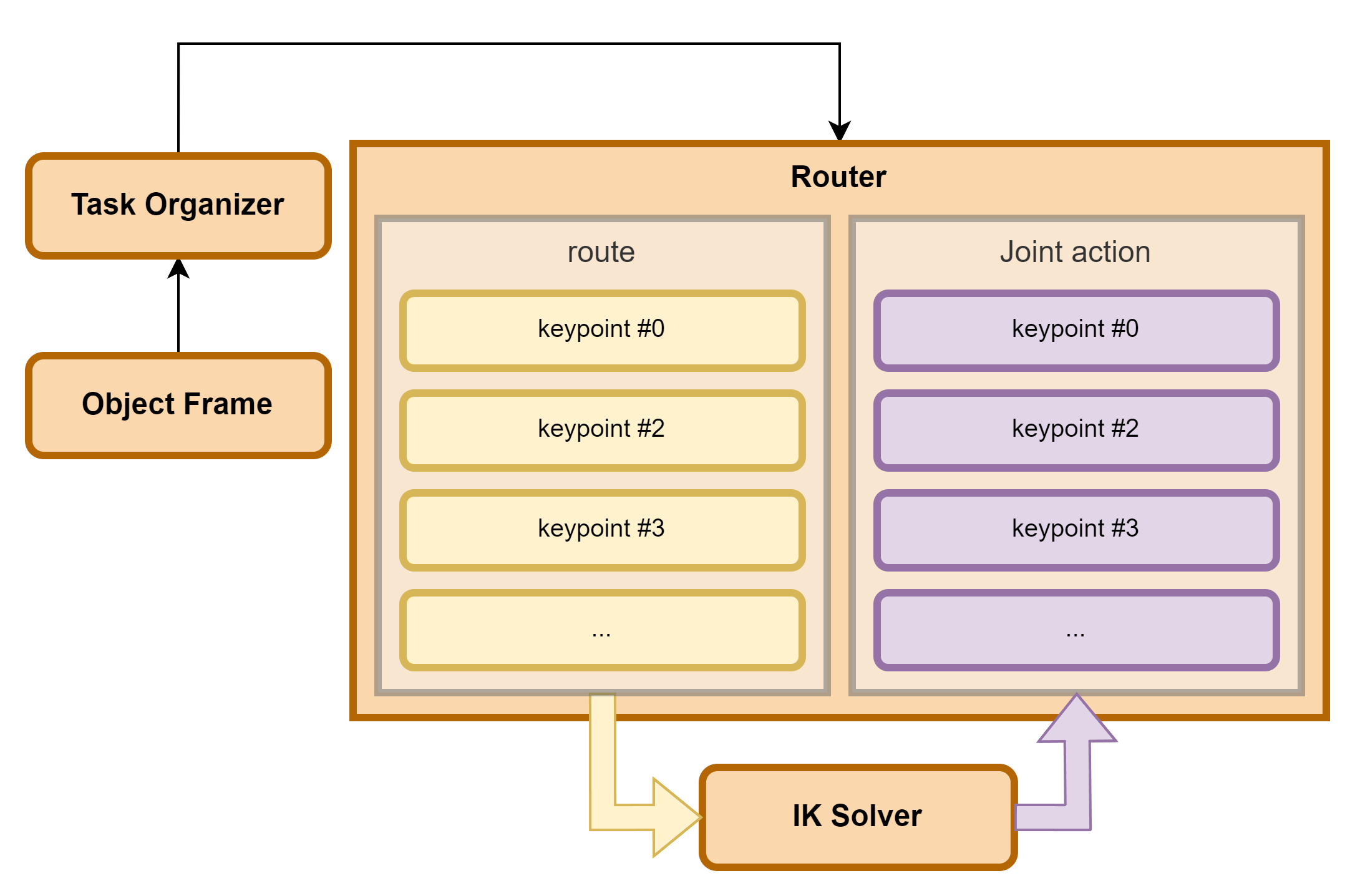
Router
Route
一条路径由若干个关键点构成,在构建路径时只需输入若干 turning point,就会自行生成路径中的关键点。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
| public class KeyPoint
{
public Vector3 pos = Vector3.zero;
public bool grab = false;
public bool wait = false;
public KeyPoint(Vector3 pos, bool grab = false, bool wait = false)
{
this.pos = pos;
this.grab = grab;
this.wait = wait;
}
}
public class Route
{
public List<KeyPoint> routes = new List<KeyPoint>();
public Route(List<KeyPoint> turningPoints)
{
if (turningPoints.Count < 2)
{
return;
}
for (int i = 1; i < turningPoints.Count; i++)
{
KeyPoint start = turningPoints[i-1];
KeyPoint end = turningPoints[i];
float dist = (start.pos - end.pos).magnitude;
int sigment = (int)(dist * 20f);
for (int j = 0; j <= sigment; j++)
{
routes.Add(new KeyPoint(start.pos + ((float)j) / sigment * (end.pos - start.pos), start.grab));
}
}
}
}
|
IK 只需要获取关键点的坐标信息就可以生成各个关节旋转的数据。
1
| InverseKinematics(GetPositionForJ4(position));
|